
https://www.youtube.com/watch?v=_C7dHqLH_d8
Buenas, en este proyecto vamos a ver como encender un motor DC mediante un mosfet, una bombilla mediante un relé, y regular una bombilla con un TRIAC, Mediante un arduino UNO, y el programa Processing.
Empezamos con el control de un motor DC:
Este es el esquematico hecho en Proteus ISIS Profesional:
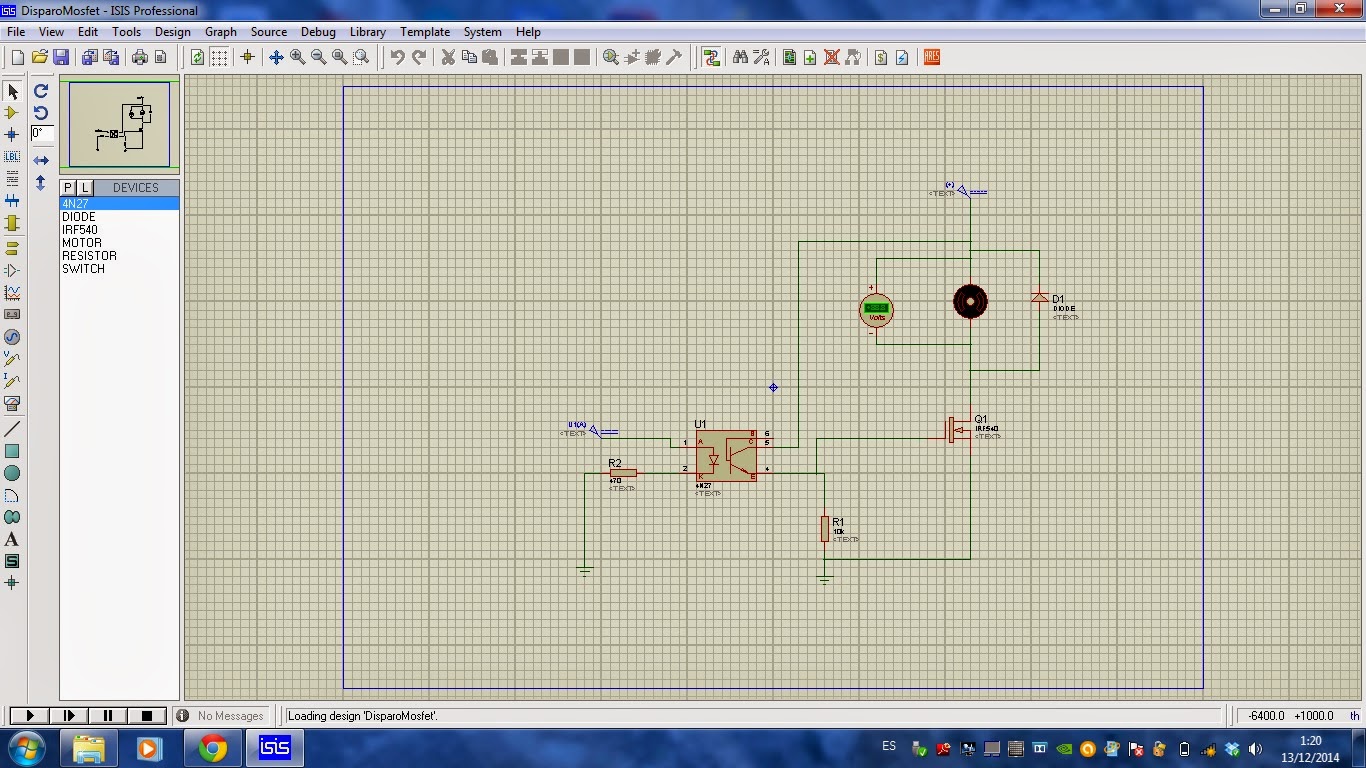
Al pin 1 del optoacoplador conectaremos el la salida PWM del Arduino, al pin 2 le conectaremos una resistencia aproximadamente de 470 ohmnios y a masa ,va bien para proteger el diodo led interno. El optoacoplador lo ponemos para proteger nuestro microcontrolador de los picos de corriente que se podrian generar con el motor.Al darle señal con el Arduino haremos que el led interno de señal al transistor interno y deje pasar la corriente que da la señal a la `Puerta´ del Mosfet y este deje pasar corriente en la parte donde esta conectado nuestro motor. En paralelo con el motor colocamos un diodo con el cátodo hacia el positivo, de esta manera estamos protegiendo el motor.
Componentes:
-Arduino UNO. (ATMEGA328-P)



-2 Resistencias: 470 y 10k ohmnios aproximadamente.

-1 Optoacoplador 4N25


-1 Mosfet IRF540

-1 Diodo


-1 Motor DC

Pasamos de ISIS a ARES, asi es como se queda mi diseño de la placa PCB:

Asi queda la placa

Este sería el circuito:

a la salida del arduino conectamos una resistencia de 1k aproximadamente que da señal a la base del transistor y deja pasar corriente atraves de la bobina interna del relé, al pasar corriente por el relé se produce un campo magnetico que atrae el contacto y cierra el segundo circuito formado por el generador de alterna y la bombilla. Como carga podriamos darle señal tanto a una bombilla como a un motor monofasico del alterna, o conectar el circuito de mando de unos contactores que activasen un motor de 400v trifasico. El diodo cumple la misma funcion que en la anterior placa, es de protección, en este caso del relé. En este circuito, no le he puesto optoacoplador debido a que ya el relé esta separando el circuito DC a 12v como mucho y el circuito en alterna a 230v con picos de hasta 300v.
Componentes:
-1Resistencia 1k
-1 transistor 2n2222

-1 diodo
-1 relé

-Un generador de alterna, (Yo usé el enchufe, al conector le corte el cable y saque fase y neutro a traves de unas regletas de conexión, CUIDADO CON LA CORRIENTE, YA ESTAMOS TRABAJANDO A 230-300V EN ALTERNA!!! MUCHA PRECAUCIÓN!

Pasamos de ISI a ARES :

Asi queda:

y por ultimo vamos con la placa del triac:

Este circuito es un poco mas complejo, primero decir que para poder regular una bombilla o un motor en corriente alterna, primero hay que entender la diferencia fundamental entre regular corriente continua y corriente alterna. En corriente continua mediante un PWM sacado del arduino regulabamos la intensidad que le haciamos pasar a los bornes del motor, bien, pues en este caso no.

Aqui tenemos la forma tipica de la corriente alterna, en nuestra red 230V y 50Hz, por lo tanto un periodo de la onda serán t=1/f , 0,002s - 20ms, medio periodo que se corresponderia con la parte o positiva o negativa y serían 10ms. Cuando nosotros encendemos un bombilla al maximo, estamos diciendo, te doy energía durante 10ms, es decir el medio periodo completo.

Ahora le vamos a decir que queremos que la intensidad de luz este al 50% por ejemplo, pues desde el arduino tendremos que decirle que le envie un pulso que deje pasar la corriente solo durante la mitad de la propagación del medio ciclo, o solo un durante un 30% o un 80%, es decir:
Eso lo conseguimos con nuestro circuito compuesto por:
-2 optoacopladores.
MOC3020 , lo usamos para separar la parte de continua de la de alterna y darle el disparo a la puerta del triac.

.jpg)
-1Triac, cuando el triac reciba señal desde el moc3020 a su compuerta, dejara pasar señal para encender nuestra bombilla

-4 resistencias 1/2 watt,1 de 470 Ohm, 2 de 1k Ohm y 1 de 10k
-1 Condensador 100kp para 400v , usado para los picos de corriente
-´1 Fusible, para proteccion del circuito
-2 Resistencias 1/2 watt
-1 puente de diodos, lo usamos para rectificar la corriente alterna, que vamos a llevar de vuelta a nuestro arduino.


-1 4n25 que es el mismo que usamos para el Mosfet, en este caso recibira la señal rectificada del puente de diodos, y dara señal al arduino cada vez que la onda senoidal pase por cero.

por la entrada, cada vez que la onda senoidal pase por cero dara paso al transistor para dejar pasar Vcc que será de 5v para no dañar nuestro arduino, con cada paso por cero el Arduino por el Pin2 (Pin especial del arduino para las Interrupciones)recibirá una señal, que este interpretara para despues procesarla y darle señal al triac y regular la intensidad.
La PCB :

Recopilamos, y simplificando: 4 partes
1º Moc3020 que da señal al Triac
2º TRiac, parte donde conectamos nuestra bombilla
3ºPuente de diodos, rectificacion
4º 4n25 que viene del puente de diodos para dar señal al arduino
Asi queda la placa:

Por ultimo vamos con los programas usados, Processing y Arduino, con Processing he hecho un interfaz grafico que muestro en el video para el control de las placas, el codigo es el siguiente:




bien, hemos enviado con Processing los datos por el puerto serie y estos datos seran recibidos por nuestro arduino, ahora vamos a decirle al arduino, que hacer con estos datos:


y ya con esto hemos terminado, un saludo.












{kind=link}